概要 #
物体検出機能では「何が」「いつ」「どこに」「何個」あるのかをリアルタイムで判定できます。
このマニュアルでは本機能を使用する際の端末の事前準備、およびモデル作成後の実装方法をまとめています。
物体検出AI導入と実装フロー #
端末設置~動画撮影の導入フロー、学習内容の実装~検出設定のフローは以下のとおりです。各項目をクリックすると、実施手順の詳細の確認ができます。
導入フロー
実装フロー
事前準備 #
物体検出AIを導入する際、以下の物資(推奨品)と環境の準備が必要です。

・KOM-MICS端末
・Webカメラ(ケーブル3m):注文コード53108074/品番:CMS-V43BK-3
商品ページはこちら
・カメラマウント(マグネット):注文コード: 03789907/品番: VEH-CMMG1
商品ページはこちら
導入手順詳細 #
端末設置 #
①以下に留意して設置場所を決める
・対象物を見下ろす角度
・対象物とカメラの距離は、映像を人が見て判別できる程度(目安10 m)
・振動する設備にはカメラ設置しない
・原則、屋内環境で用いること
・通路を挟むのは非推奨
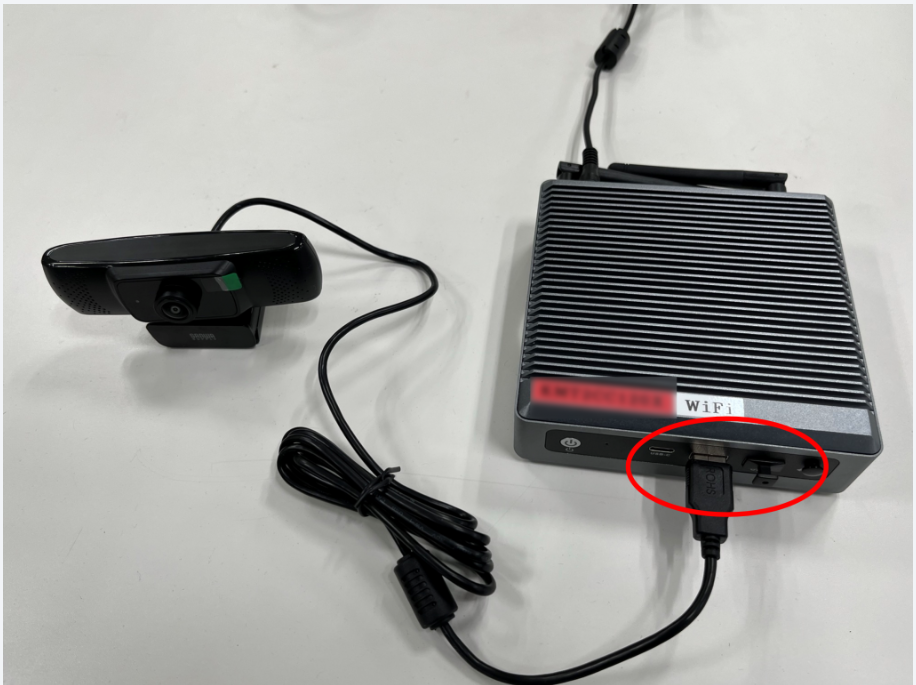
②KOM-MICS端末とカメラをUSB接続する
端末設定 #
①KOM-MICS端末にリモートデスクトップで入り、Logger設定をしていく
Loggerインストール手順はこちらを参照
②「設備種類選択」から「物体検出(エッジデバイスのみ)」を選択する
③「設備設定方法」から「設備新規登録」を選択する

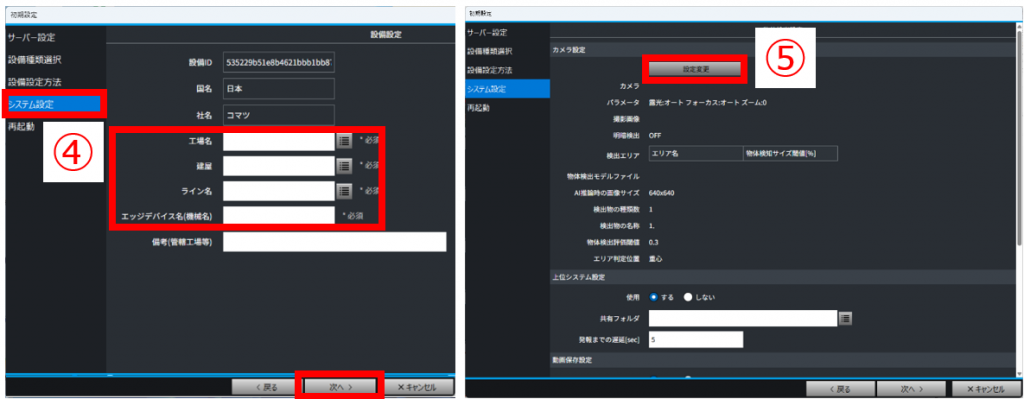
④「システム設定」の「アプリケーション設定」はそのまま「次へ」進み、
「設備設定」の「工場名・建屋・ライン名・エッジデバイス(任意の名前)」を入力し、「次へ」をクリック
する
⑤「物体検出設定」の「設定変更」をクリックする
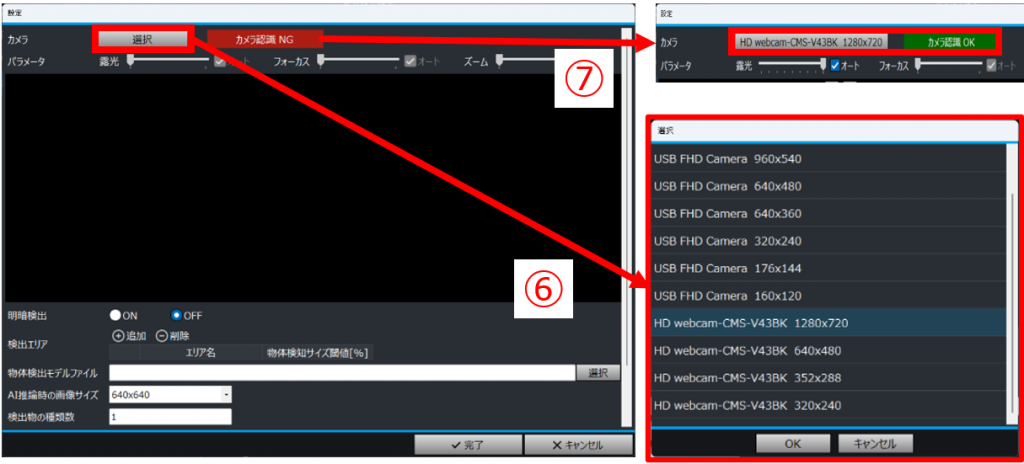
⑥カメラの「選択」をクリックし、つなげているカメラを選択したら「OK」をクリックする
(推奨カメラ(CMS-V43BK)の場合、「1280×720」を選択)
⑦「カメラ認識OK」であることを確認する
⑧「設定」画面にカメラ映像が映し出されるので、画角に問題がないかを確認する。問題なければ「完了」を
クリックし、「物体検出設定」画面に戻る
⑨「物体検出設定」の詳細項目は以下のように設定する
・上位システム設定
ー使用「する」で設定
ー発報までの遅延…検出結果の状態が変わってから、様子見する時間
・物体検出結果アップロード設定
ー使用「する」で設定
・画像保存設定
ーViewerで判定画像を閲覧する場合、使用「する」で設定
ー保存フォルダの指定も可能
ーファイル保存日数…この日数を超えた動画は順次削除される
・動画保存設定
ー判定結果を保存する場合、使用「する」で設定
ー1ファイルのフレーム数…推奨機器だと、判定はおよそ1Hz/回=3600フレームで約1Hの動画
ー再生速度…1秒間に何フレーム入れるか
ーファイル保存日数…この日数を超えた動画は順次削除される
・端末再起動設定:キャッシュクリアのための再起動設定
ー曜日および時刻…再起動する日時を指定
⑩すべての設定を終えたら、「完了」をクリックし、再起動するとカメラ映像が映し出される
この状態で、学習用動画の保存ができるようになっている
※「AI推論実行失敗」はモデル実装前なのでそのままで構わない
実装手順詳細 #
学習内容保存 #
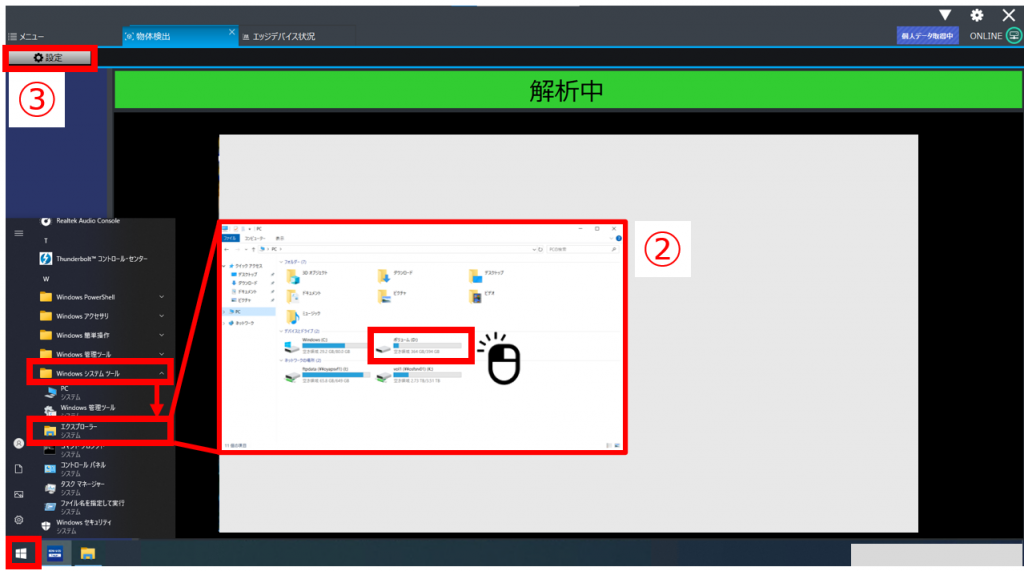
①モデル実装したいLoggerにアクセスする
②学習完了後にダウンロードしたONNXファイルを、LoggerのDドライブ内に保存する
ダウンロード方法はこちらのマニュアルを参照
検出設定 #
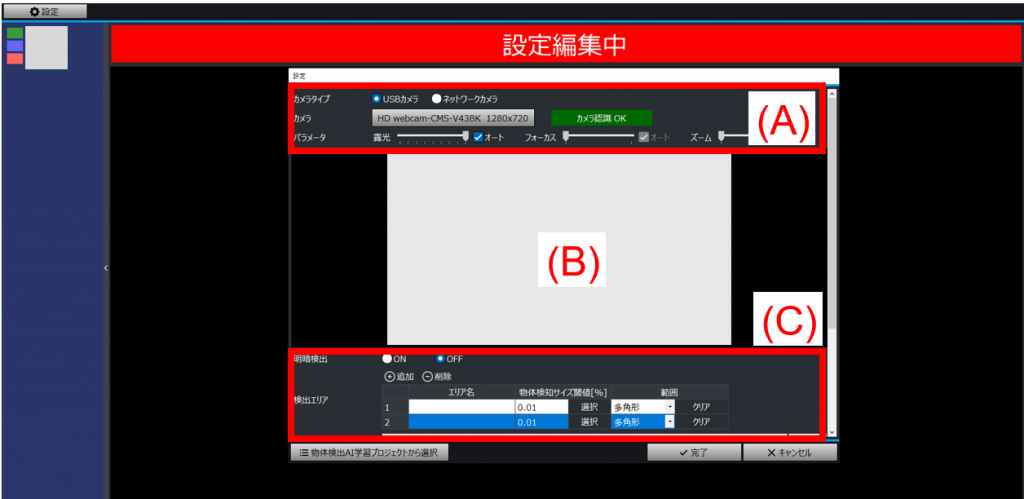
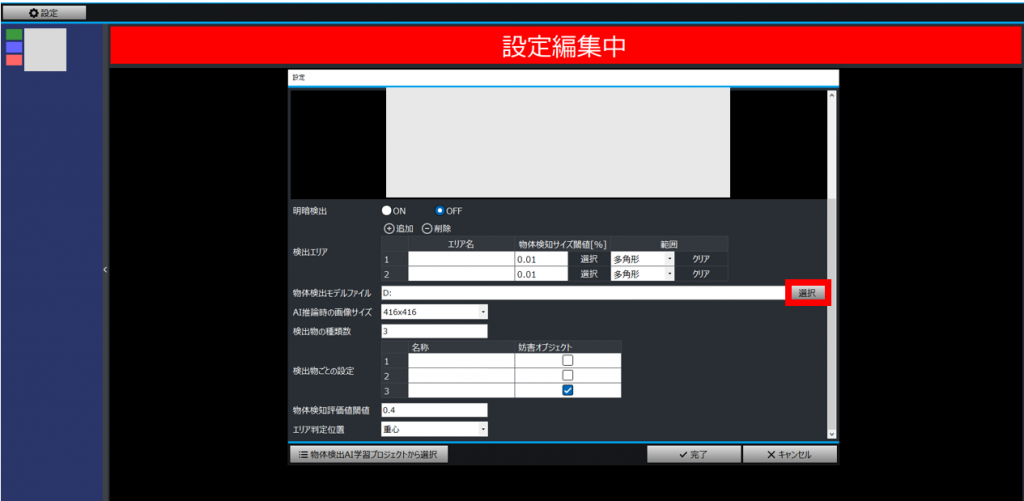
検出設定画面構成
画面構成は以下のようになっている
(A) 接続カメラ情報
(B) カメラ映像
(C) 検出設定
各項目を以下のように設定する
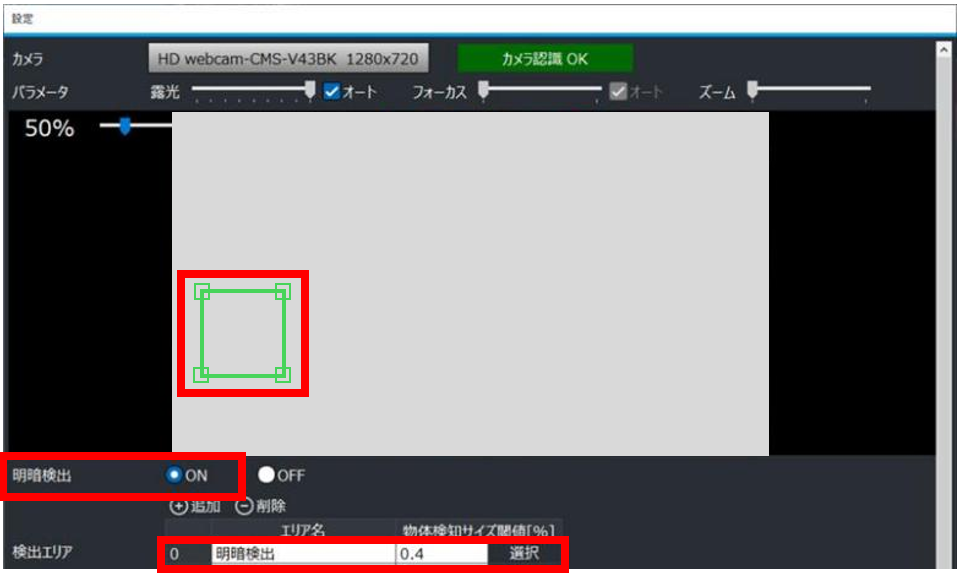
・明暗検出
アノテーション時に明暗検出機能を「ON」にした場合、こちらも「ON」にする
「ON」にした場合は、「明暗検出エリア」が自動で作成される
エリアは、タグ位置に合わせて調整すること
※「明暗検出機能」の詳細は、こちらを参照
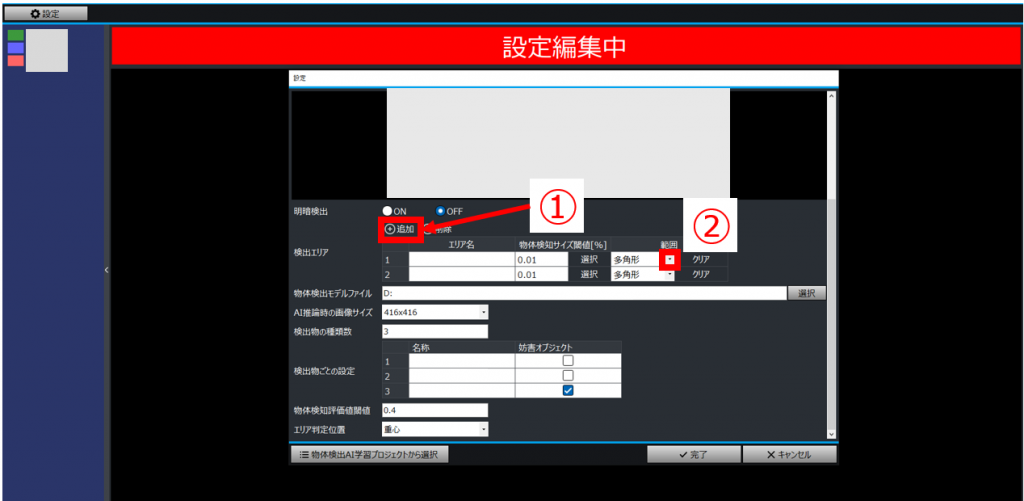
・検出エリア設定
①「追加」をクリックし、「エリア名」を設定する
②「範囲」の「▼」をクリックし、範囲設定方法を「矩形/多角形」に切り替えられる
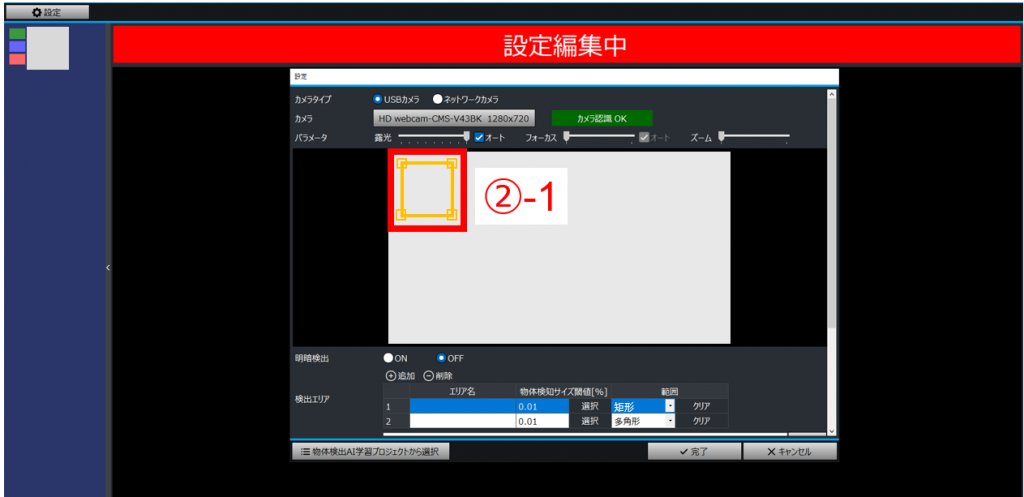
1. 「矩形」にした場合
・エリア設定用ボックスが、カメラ映像左上に出現するので、「〇アノテーション④⑤」と同様にエリア設定を行う
2. 「多角形」にした場合
以下に、「多角形」選択時の、検出エリア設定画面を示す。
「写真 検出エリア 多角形」
①カーソルをカメラ映像内に移動させ、カーソルが「+」になっているのを確認する
②検出エリアにしたいエリアをクリックして囲む
③エリアの始点にカーソルを合わせ、エリアを閉じる
④エリアの角にカーソルを合わせ、ドラッグしながら、エリアの範囲を調節する

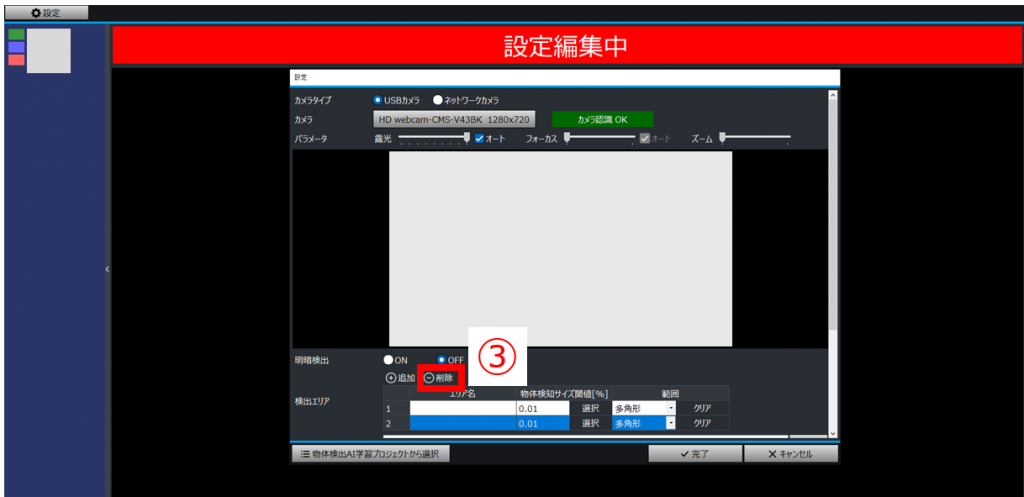
③不要なエリアがある場合、「削除」をクリックする
・物体検知サイズ閾値設定
物体として検出する最小サイズの閾値を設定する。
デフォルト値のままでも構わないが、以下の場合は設定が必要。
・(検出したい物体サイズ)<=(サイズ閾値) …サイズ閾値を小さくする
・検出したい物体ではないもの、かつサイズが小さい物体を誤検知している …サイズ閾値を大きくする
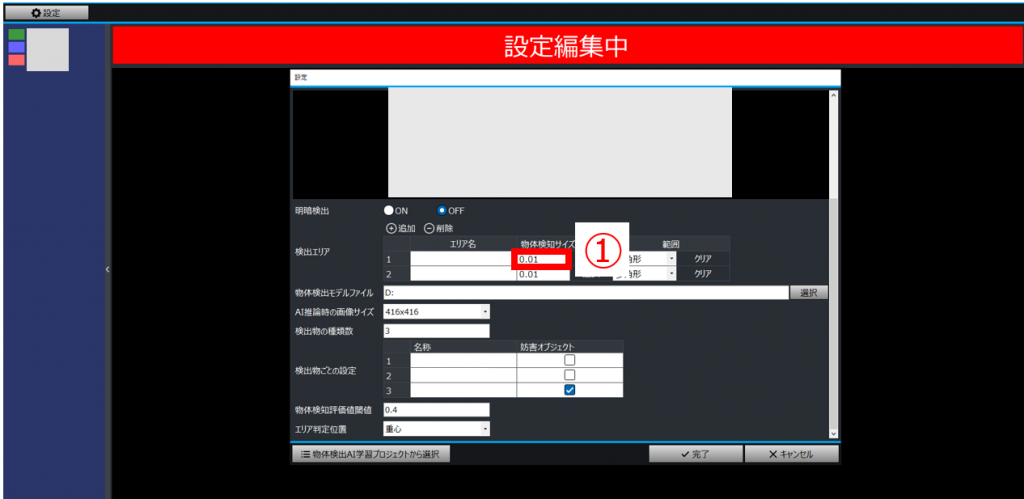
・閾値の変更方法
① 値の直接入力
・閾値をクリックし、値を手入力
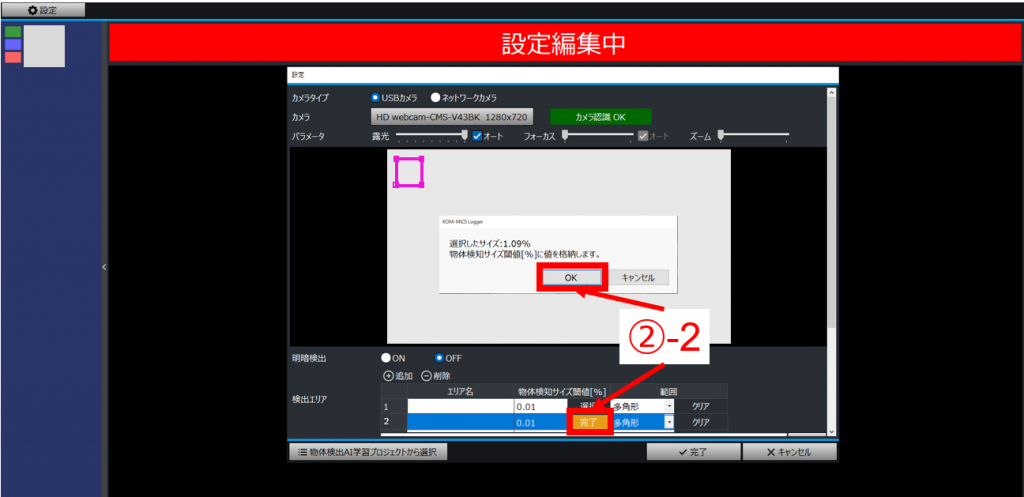
② ボックスサイズを調節
1 「選択」をクリックし、カメラ映像左上のボックスサイズを調節(調整方法は「こちら」と同様)する

2 「完了」をクリックし、ポップアップの「OK」をクリックして値を設定する
・物体検出モデルファイル
作成したAIモデルをLoggerに実装する。
方法が2つあり、1の方が簡単である。
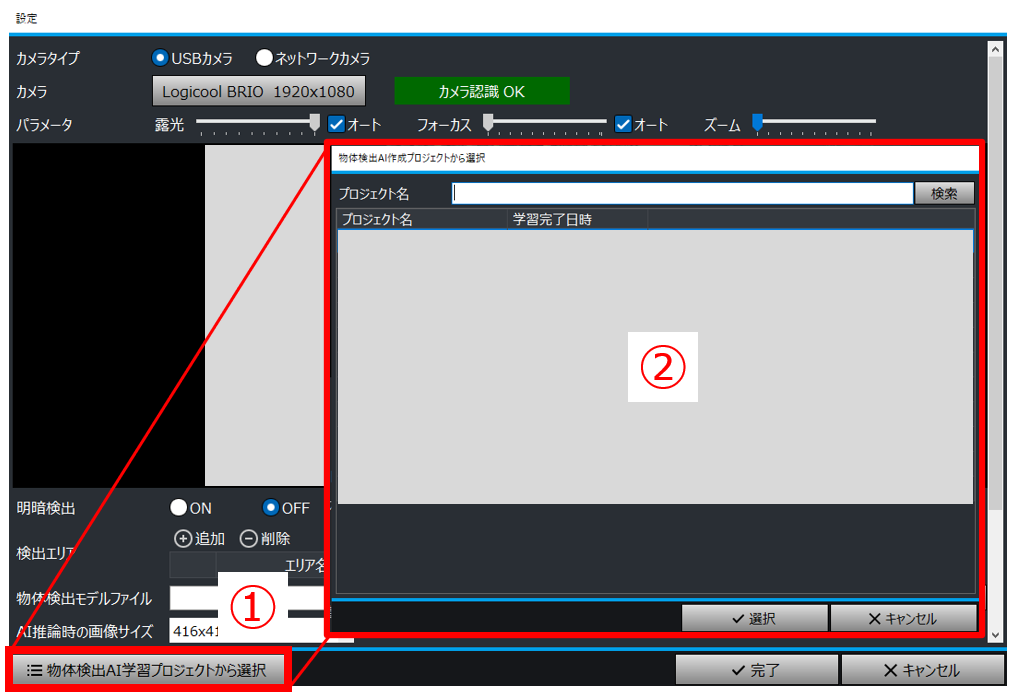
方法1
①「物体検出AI学習プロジェクトから選択」をクリックし
②作成したプロジェクトを選択する
方法2 「選択」をクリックし、「手順詳細②」のファイルを指定
・AI推論時の画像サイズ
YOLOX-Tinyで学習を行った場合、「416×416」
・検出物の種類数と検出物ごとの設定
検出物の種類数:アノテーション時のラベルリスト数と合わせる
検出物ごとの設定:名称を入力(日本語入力可)
「妨害オブジェクト」として設定したいものにはチェックをいれる
※「妨害オブジェクト機能」の詳細はこちらを参照
・物体検出評価値閾値
物体が検出対象であるとされる確信度。デフォルトのままで構わない。ただし、確信度を変更することで判定精度がよくなるのであれば変更する。
・エリア判定位置
「▼」をクリックすると、検出物の「重心/下端中央」を選択できる。基本的に「重心」で構わないが、検出物の特徴が出やすい方を選択する。
例)「人」を検出する場合、「足」は特徴として拾いやすいので下端中央を選択
検出設定完了後 #
「解析中」と表示あれば正しく設定できている。
補足 #
妨害オブジェクト機能
本機能は、「ある物体がエリア内で検出されたとき、そのエリアでの判定結果を無効にする」というものです。
例)妨害オブジェクト:人
エリア内で「部品が3個+人が1人」検出された
…人(妨害オブジェクト)が検出されたので、部品3個の判定は無効とする
この機能は以下のように活用できます。
・部品が0個のとき、搬送指示を行うため上位システムに通知する
ただし、「人」がエリア内にいるときは、安全のため上位システム通知をしたくない
…「人」を妨害オブジェクトとして、モデル作成をすることで、上記が達成できます。