コマツ産機製アーク溶接ロボット(C3,C4,C5)に、KOM-MICS Loggerを接続するための設定マニュアルです。
ハードウェア(溶接ロボット・端末・通信環境)の要件を確認する #
溶接ロボットの要件 #
| 項目 | 要件 |
| コントローラ型番 | C3,C4 CXX,KXRC,NXは非対応です。 |
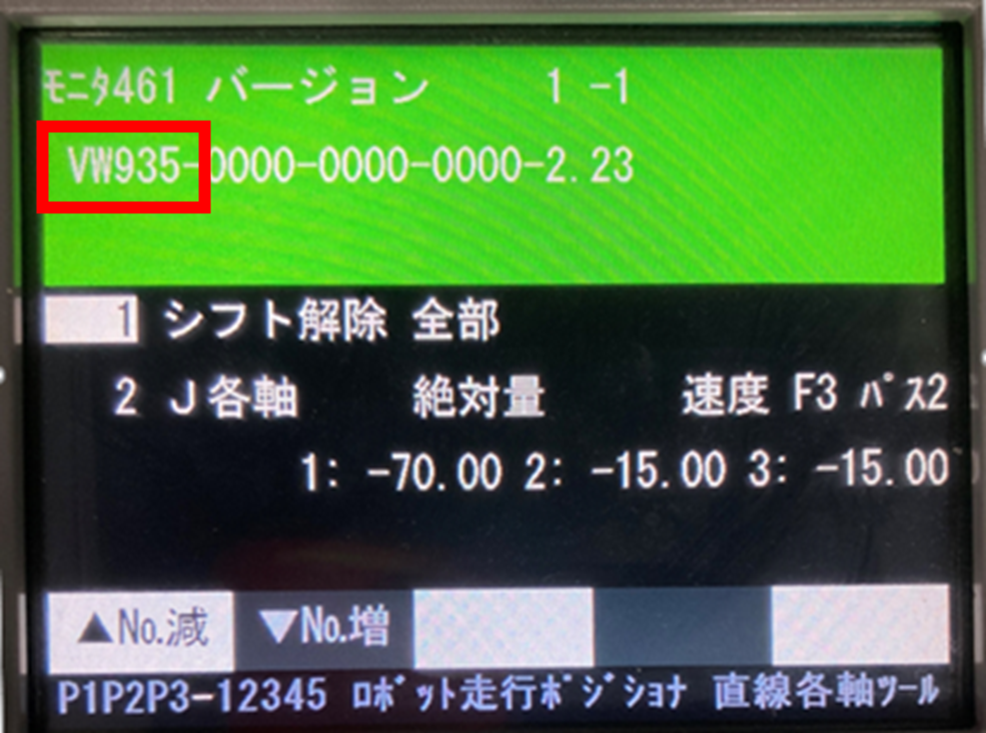
| コントローラバージョン | C3:W665以降 C3:W765以降 C4:W827以降 C4MC:W927以降 バージョンアップが必要な場合は、コマツ産機に依頼してください |
コントローラバージョンはティーチングペンダントでモニタの461を表示する事で確認できます。VW以下3桁の値がコントローラバージョンです。
端末の要件 #
推奨端末の項も参照ください。
端末選定でご不明の場合は、KOM-MICS サポートデスクか、クオリカ株式会社KOM-MICS 販売担当(担当:和田 keishirou_wada@qualica.co.jp)までご連絡ください。
| 項目 | 要件 |
| 電源 | 必須:24時間電源が入る状況を維持できる事。 設備電源と連動した電源(サービス電源など)を使用する場合は別途ご相談ください |
| ネットワーク接続 | 必須:常時インターネット接続が確立されている事。 (有線LAN回線が推奨ですが、無線LANでも可能です) |
| イーサネットポート | 推奨:2つ以上(ロボットとのネットワーク接続用に1ポート、インターネット接続に1ポートとして) 必須:1つ以上 1つしかない場合、別売りのLANハブをご用意ください。 |
| OS | 推奨:Windows10, Windows11,Windows IoT Enterprise LTSC 動作検証済み:Windows7,Windows8.1 Windows7:2020年10月 Microsoftサポート終了 Windows8.1:2023年1月 Microsoftサポート終了 Windows10:2025年10月 Microsoftサポート終了予定 サポートの終了したOSは、セキュリテイリスクが増加する懸念があります。 新規導入・置き換えはWindows11か、Windows IoT Enterprise LTSCを、ご検討ください。 |
| PC形態 | 推奨:デスクトップPC、産業用PC ラップトップPC、タブレットPCも可ですが、動作時の負荷・廃熱にご注意ください |
| ログイン | 必須:管理者権限使用できる事 |
| CPU/メモリ | 下表参照(同時接続するロボット台数により異なる) |
| ストレージ空き容量 | 推奨:50GB以上 必須:30GB以上 |
ロボットの同時接続台数と必要なPC(CPU/RAM)スペック目安
| 接続するロボット台数 (端末1台につき) | CPU PassMark (CPU性能指標) | 主なCPU ()内はPassMark値 | RAM |
| 1台 | 1000~2000 | Celeron N3350 (1113) Celeron J4025 (1946) | 4GB |
| 2~3台 | ~3000 | Core i3-4308U (2999) | 4~8GB |
| ~4台 | ~4000 | Celeron J6412 (3898) Core i3-1115GRE (3918) | 8~16GB |
| 4~8台 | ~9000 | Core i5-1145GRE (9697) Core i5-1135G7 (10044) | 16GB |
| 10~台 | 10000~ | Core i7-12700T (22645) Ryzen9 5900HX (22955) | 16~32GB |
上記はあくまで目安です。特に8台以上の溶接ロボットを接続する場合の端末選定は、別途ご相談ください。
通信環境(ネットワークインフラ)の要件 #
| 項目 | 要件 |
| 使用するLANケーブル | ストレートケーブル、クロスケーブルのどちらでも可 |
| イーサネットハブ(LAN)の電源 | 必須:24時間電源が入る状況を維持できる事。 |
| プライベートIPアドレス割り当て | 必須:ロボットのIPアドレスに192.168.2.XX以外を使用の事 192.168.2.XXはロボットのティーチングペンダントに使用のため、重複した場合にティーチング・操作不能になることがあります。 |
| ネットワーク構成 | 必須:端末とロボットはケーブルで直接接続するか、イーサネットハブを介して接続し、ルータを使用しない事 良い例:ロボットと端末を直接LAN(イーサネット)ケーブルで接続している  良い例2:ロボットと端末の間にイーサネットハブを入れて、分岐させて複数のロボットと端末1台を接続している 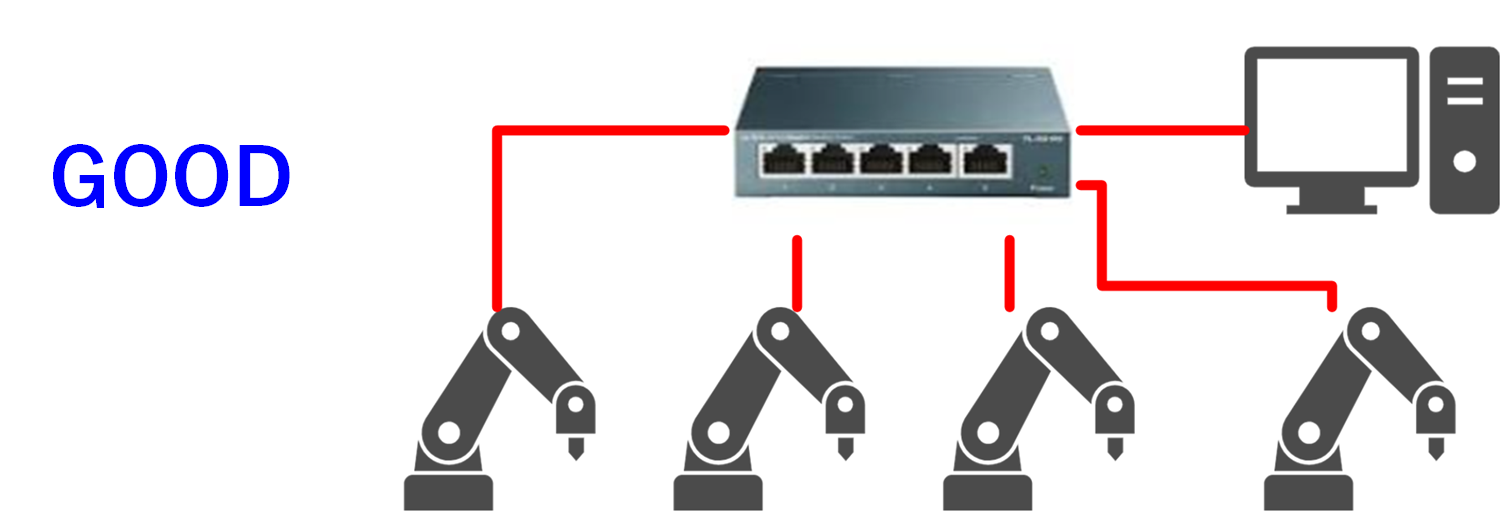 悪い例:ロボットと端末の間にインターネット接続に使えるルータを使用している 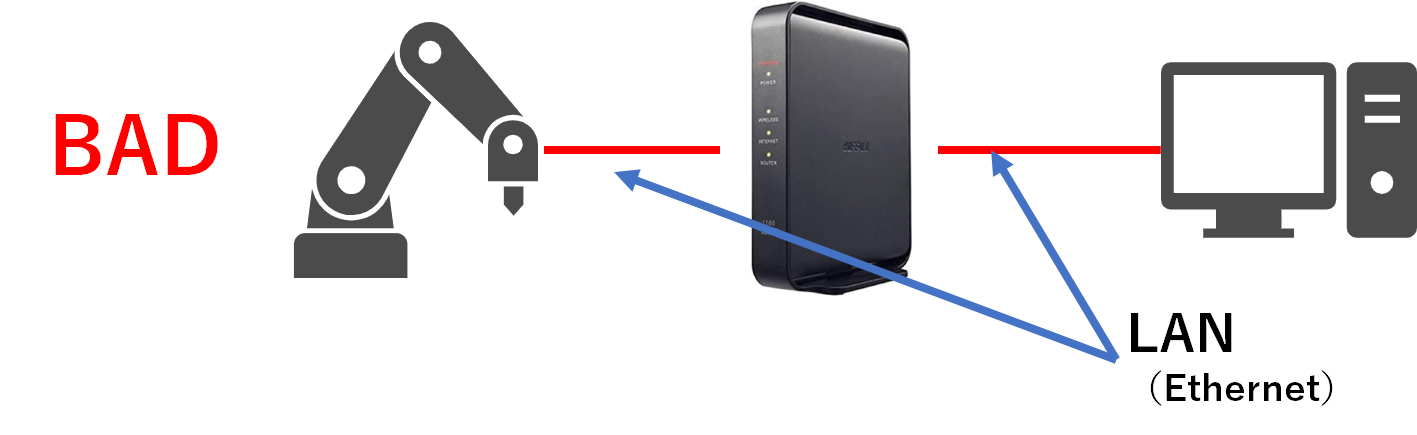 |
ロボットの接続設定 #
⚠注意:感電の恐れあり、下記徹底の事
・操作盤内作業時(LANケーブル接続作業)は設備の一次電源を確実にOFFして作業の事
・設備の一次電源OFF後も、帯電個所がある場合は絶縁手袋・シートを付けて保護措置する事
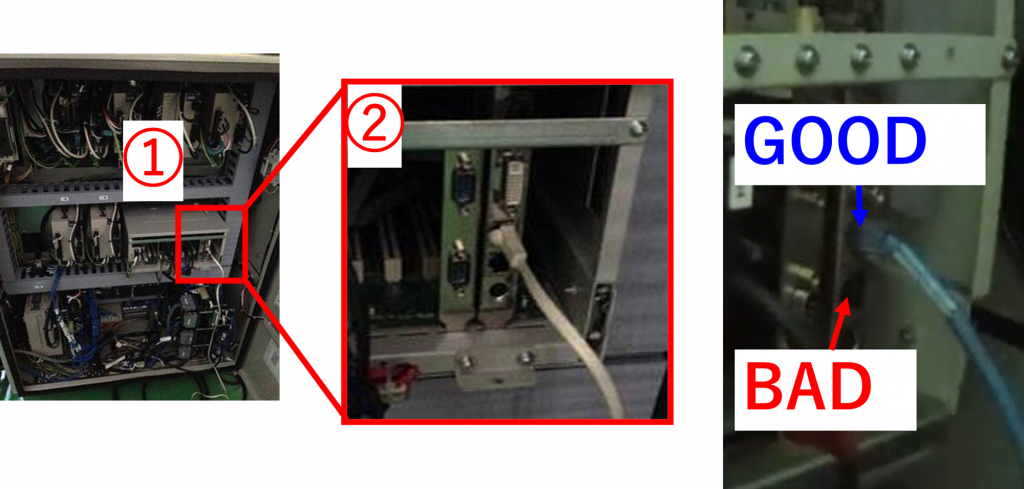
LANケーブル接続 #
ロボットコントローラ内の通信ポートにLANケーブルを接続します。コントローラを開ける際には電源を切ってください。また、本作業は有資格者のみが行ってください。LANポートが2つありますが、上側に必ず接続してください。(下側は使用不可)
IPアドレスを設定するときの注意点 #
(プライベート)IPアドレスは、ある同じネットワーク階層に存在する、端末とロボット(1台もしくは複数台)のネットワーク上の所在を定めた特定の番号になります。Kom-micsでは端末・ロボット間でデータの送受信を行うために、ロボット・端末間のIPアドレスが正しく設定されている事が必要です。”正しく”、とは以下の事を指します。
- 192.168.1.XX(XXはロボット・端末ごとに異なる値 )とする
- 端末・ロボットのそれぞれが末尾XX(第4クオテット)で全て異なるIPアドレスを持つ(192.168.1.XX)
下に、端末1台でロボット4台を、イーサネットハブを介して接続し、同じネットワーク階層を構成した例を示します。
良い例:全て異なるIPアドレス

良い例では、端末・ロボット全てに末尾が異なるIPアドレスを持っており、IPアドレスを元にした、データの送受信指示が適切に行う事ができます。
悪い例:ロボット間で重複したIPアドレス
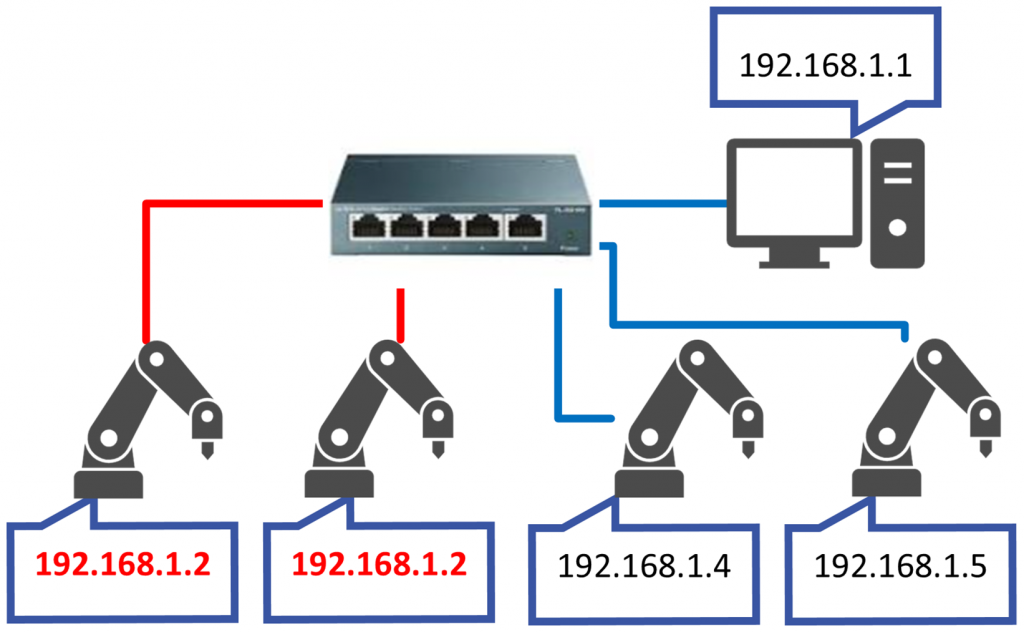
こちらは、ロボット2台が全く同じIPアドレスを持っており、ネットワーク上では、どちらのロボットかを判断できません。従って、端末は両方のロボットと通信ができなくなります。
上記の悪い例を防ぐため、複数のロボットを一度に設定する場合は、ロボットと端末の設定でIPアドレスの重複を生じないよう、メモを取り、確認しながら作業ください。
ロボットのIPアドレスとポートを設定する #
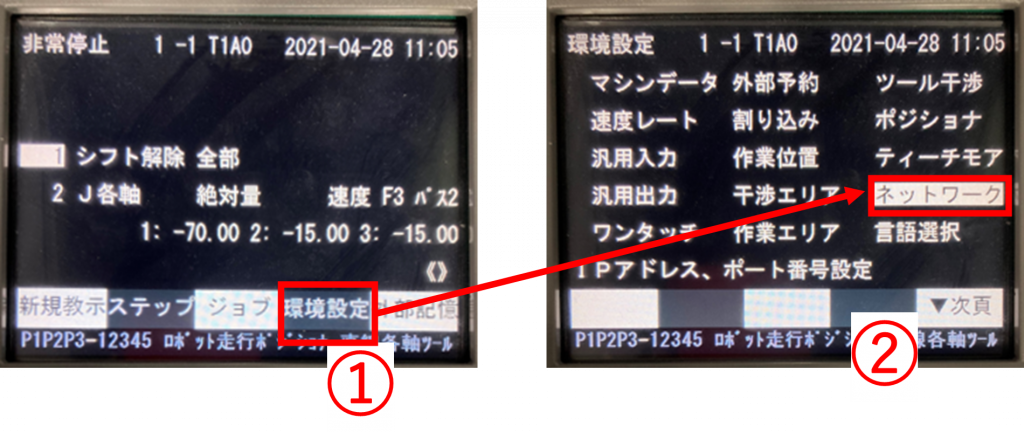
ロボット側のIPアドレスはティーチングペンダントで設定します。
①ティーチングペンダントで”環境設定”を選択
②”ネットワーク”を選択
⚠注意:ロボットのIPに誤って192.168.2.XXを使用しないでください。
192.168.2.XXはロボットのティーチングペンダントに使用のため、重複した場合にティーチング・操作不能になることがあります。
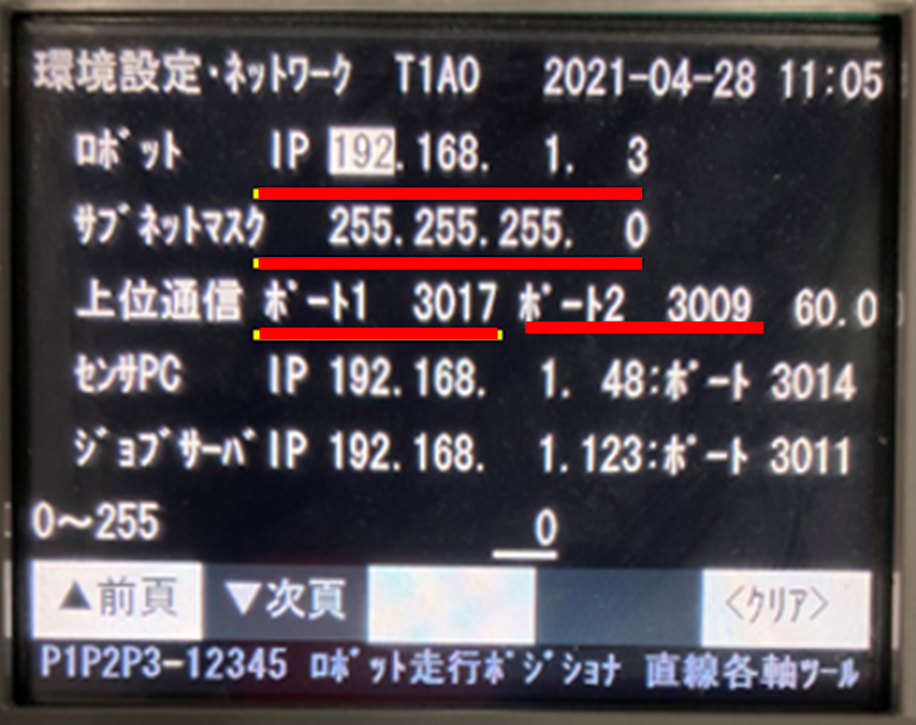
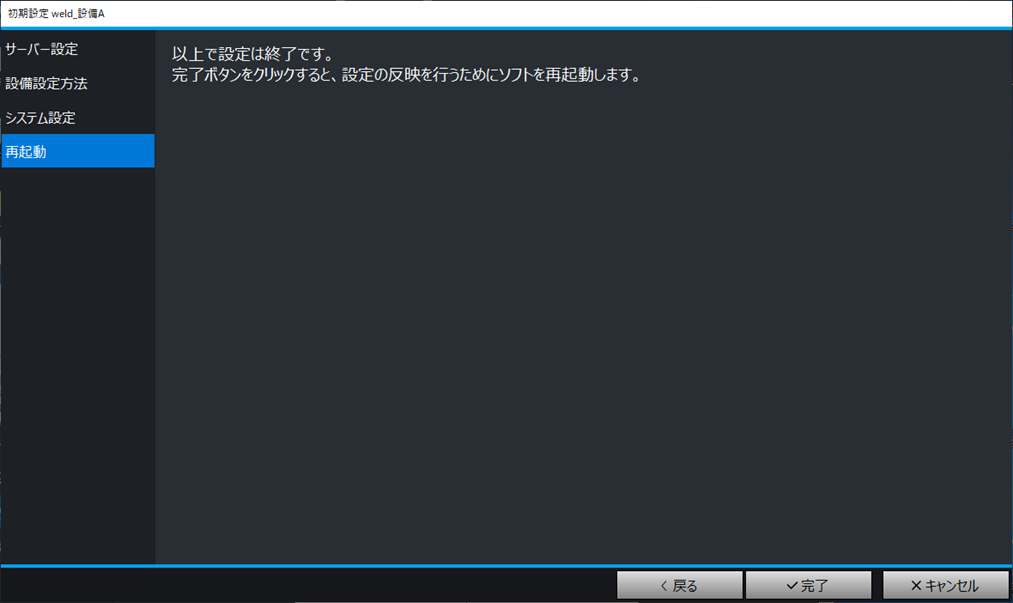
④完了後、ロボットを再起動してください
ロボットのジョブにKOM-MICS 命令を追加する #
ロボットのメインジョブに”KOM-MICS 命令”を追加します。これにより工程(自動サイクル)の開始・終了を明確に取得する事ができます。(必須)
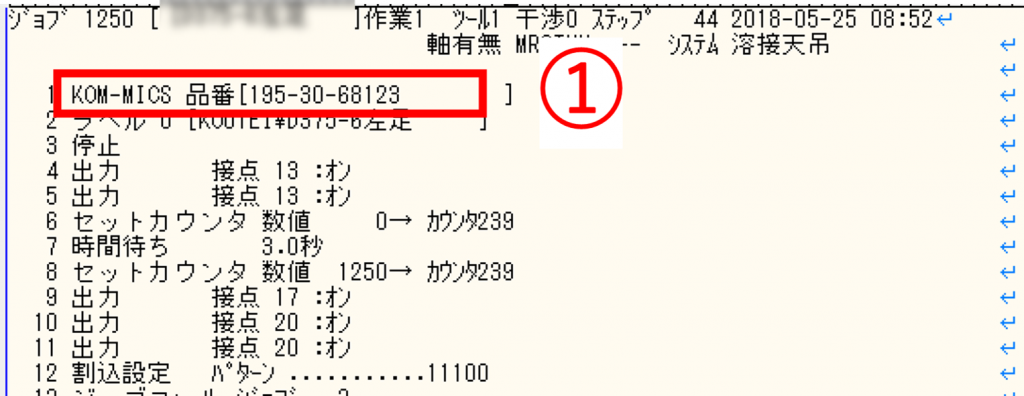
①メインジョブの先頭にKOM-MICS 品番命令を追加する。必ず10桁か12桁を入力する事。(11桁、13桁は不可)
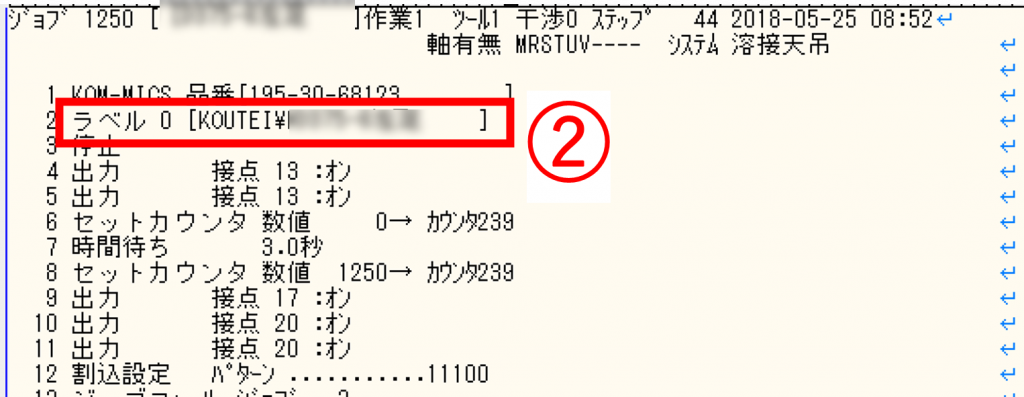
②工程名を登録したい場合は、ラベル命令で工程名を入力する。全て半角英字”KOUTEI¥”と入力し、その後ろに登録したい工程名を入力する。
コマツ以外の製品を作るジョブはKOM-MICS 他社命令を入力してください。(データがKOM-MICS でマスクされ、詳細を閲覧できなくなります)
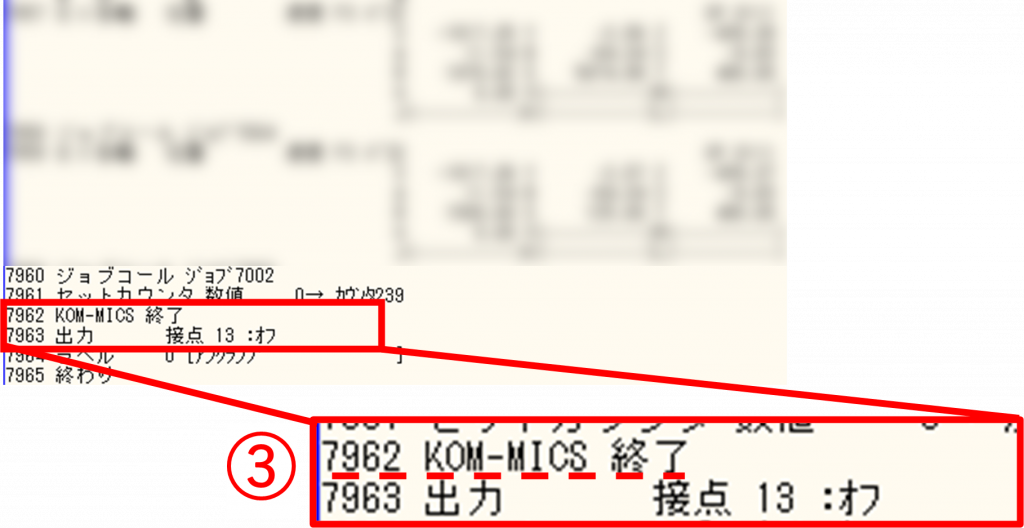
③メインジョブの末尾にKOM-MICS 終了命令を追加する。
⚠注意:KOM-MICS 終了命令は自動運転フラグの接点がOFFする前に入れてください。
自動運転フラグがOFFになった後にKOM-MICS 終了命令を実行するとエラーを生じる事があります。
端末の設定を行う #
端末にLANアダプタを増設する(LANポートが1つのPCのみ) #
通常のデスクトップ・ラップトップ・タブレットPC端末は、LANポートが1つだけである事が多いです。一方、ロボット側との接続には有線LANが必要になるため、インターネット接続を既設のLANポートで実施する場合、ロボットとの通信のため端末側のポート増設が必要になります。
備考:端末~インターネットの接続を無線Wi-Fi・LTEで実施する、もしくはLANポートが2つ以上ある端末はこの手順不要です。
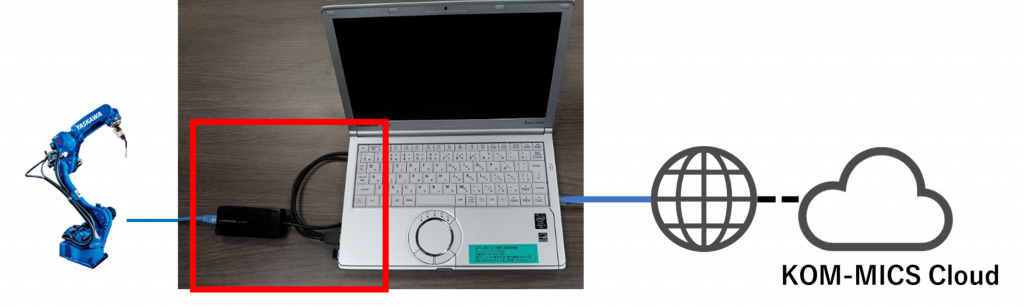
①市販のUSB-LAN変換アダプタを購入し、USBで端末側と接続します。
(推奨機種:BUFFALO USB-LANアダプタ LUA-U2-ATX)

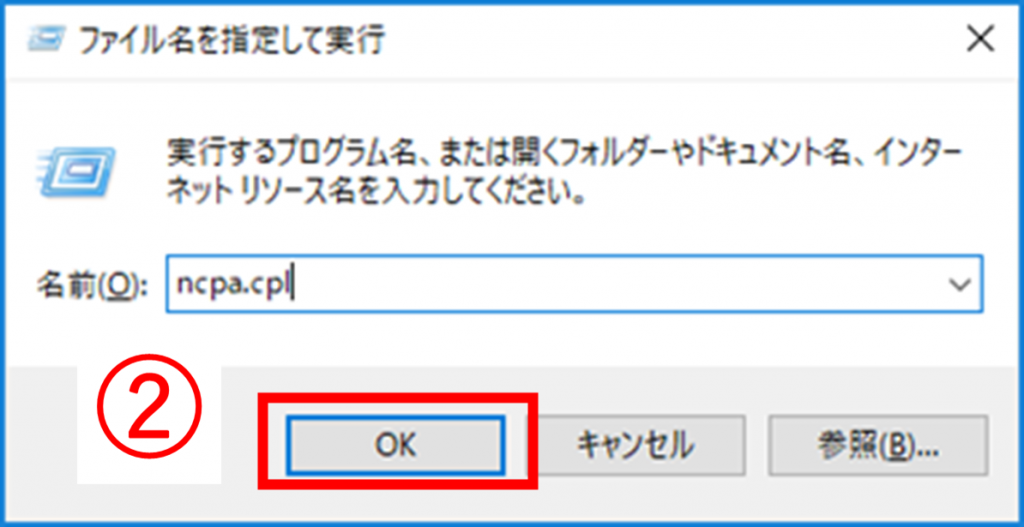
②増設したLANアダプタのポートは、端末側のIPアドレスが固定されていないため、そのままロボットに接続して設定しても通信できません。そのため、追加したアダプタのIPを固定します。キーボードでWindowsボタン![]() +Rと押すと、”ファイル名を指定して実行”が起動します。そこに”ncpa.cpl”と入力してOKをクリックします。
+Rと押すと、”ファイル名を指定して実行”が起動します。そこに”ncpa.cpl”と入力してOKをクリックします。
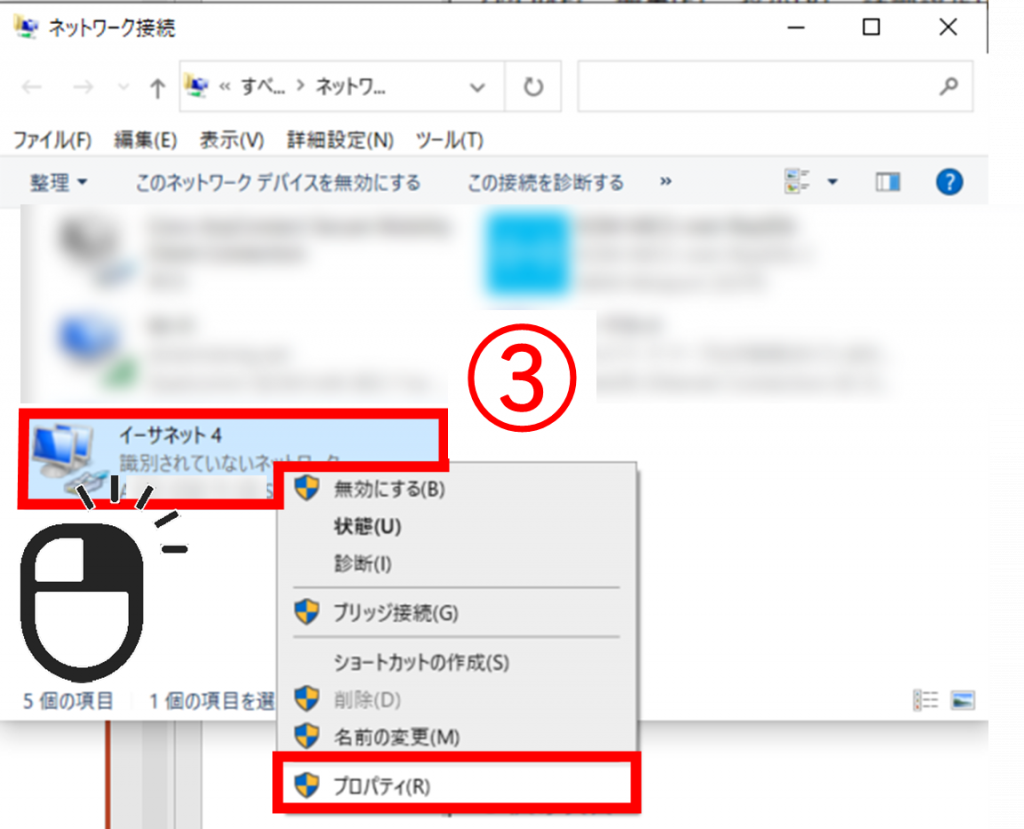
③ネットワークアダプタの一覧が表示されるので、増設したLANアダプタのアイコンで右クリックして、”プロパティ”をクリックします。
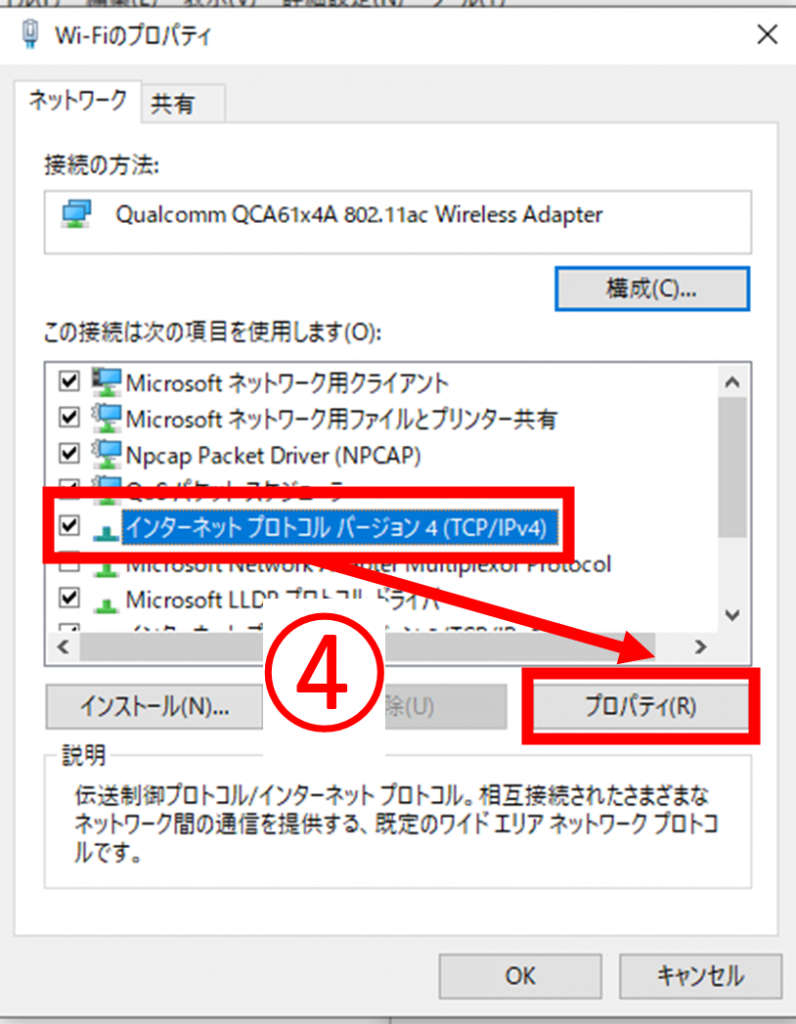
④インターネットプロトコルバージョン4(TCP/IPv4)を選択して青いハイライト表示にし、プロバティをクリック
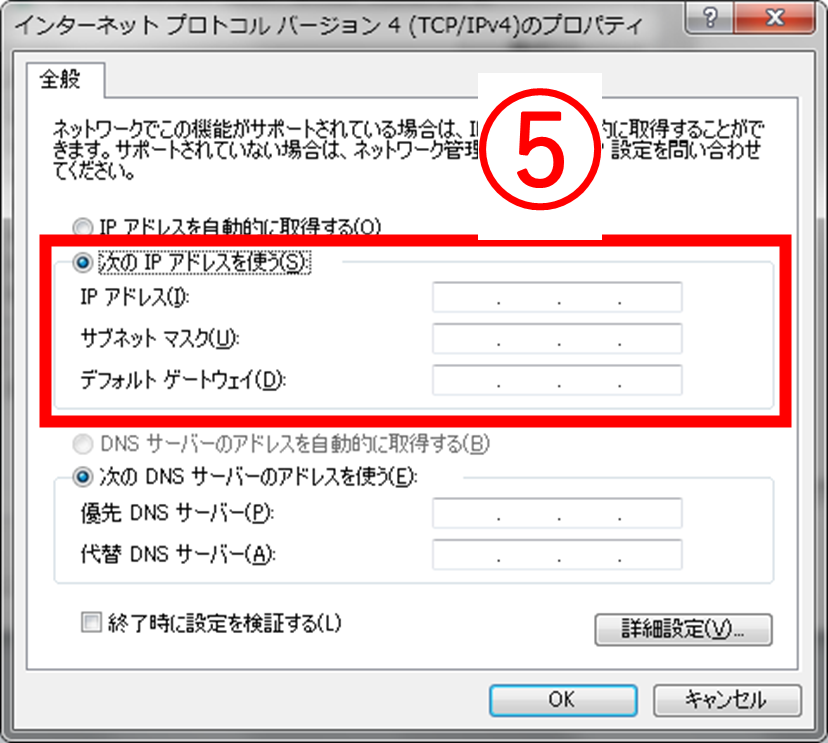
⑤”次のIPアドレスを使う”を有効にして、IPアドレスとサブネットマスクを次のように設定する。
IPアドレス:”192.168.1.XX”(IPアドレス設定の注意点で記した端末のIPアドレスです)
サブネットマスク”255.255.255.0″
設定後、”OK”をクリックします。
⑥既設のLANアダプタがインターネット接続できることを確認する
既設のLAN(有線・無線・LTE)がインターネットに繋がることを確認する。
以上でLANの増設作業は終了です。
KOM-MICS Loggerをインストールする #
以下の手順でKOM-MICS Loggerをインストールします。
インストール手順は他の工作機械などと共通の手順になりますので、詳細はリンク先を参照ください。
溶接ロボットのLogger設定 #
溶接ロボット固有のLogger設定手順を示します。
設備種類で共通のLoggeer設定項目に関しましては以下を参照してください。
「Loggerの設定 共通項目の設定」
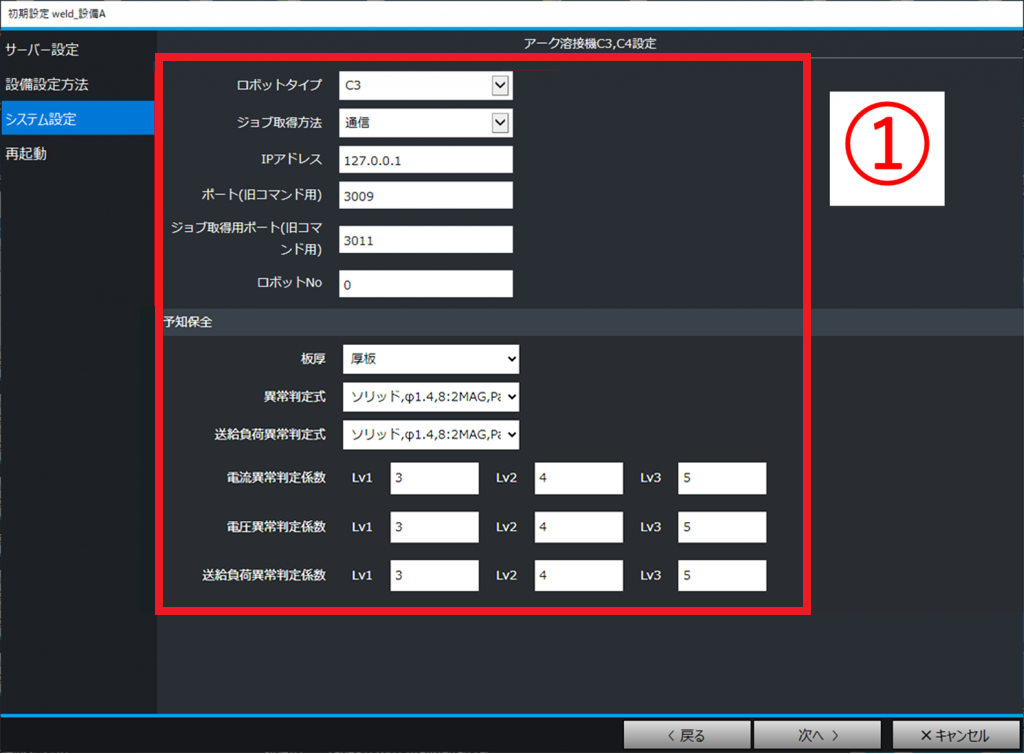
①アーク溶接機のシステム設定を行います。次のように行ってください
- ロボット:C3,C4のいずれかを選択してください
- ジョブ取得方法:”通信”を選択してください
- IPアドレス:接続されるロボット側で設定したIPアドレスを入力してください
- ポート(旧コマンド用):接続されるロボット側で設定したポート1を入力してください
- ジョブ取得用ポート(旧コマンド用):ポート2を入力してください
- ロボットNo:CSVのヘッダー番号を入力して下さい
次に予知保全設定を行います。計算モデルを設定することで、予知保全ダッシュボードを適用できます。
尚、予知保全を使用しない、又は未定の場合は設定をスキップしてください。
- 板厚:”厚板”もしくは”薄板”から選択してください
- 異常判定式:対象のロボットの設備条件に合わせて選択してください
- 送給負荷異常判定式:対象のロボットの設備条件に合わせて選択してください
- 電流異常判定係数:電流の異常判定係数を設定してください
- 電圧異常判定係数:電圧の異常判定係数を設定してください
- 送給負荷異常判定係数:送給負荷の異常判定係数を設定してください
②溶接機(電源・使用するワイヤの情報など)の設定を行います。
稼働状態を正確に取得するため、必ず入力してください。
③総電力として概算する機能の有効/無効を指定します。デフォルトの原単位は変更が可能です。
(EnOcean電力計を使用している場合は電力計の測定値を使用します)
④設定完了です。複数のロボットを接続する場合は引き続き2台目,3台目…と設定してください。